
Introduction
I once stood on a small pier watching a neighbor silently start his boat with a whisper-quiet drive, and I thought: the future has already begun. In many workshops and ports today, the electric motor is no longer a novelty; recent industry surveys show adoption rising by double digits year over year (about 12–15% in light vehicles and marine retrofit markets). I would like to share this with you politely and plainly: what does this mean for people who choose, install, or maintain these systems? We see clear shifts in torque demands, energy efficiency, and control needs — and these shifts raise practical questions for everyday users and designers alike. Where should we focus our attention next — on performance, cost, or ease of service? — funny how that works, right? Please read on as I move to the technical heart of the matter.

Deeper Layer: Why Current Solutions Often Fall Short
Why does this matter?
When I examine a brushless electric motor installation, I often notice repeated choices that later cause trouble. Designers select a motor for nameplate power, but they may overlook real-world duty cycles, thermal limits, and control integration. Field-oriented control, inverter sizing, and power converters are mentioned in specs — yet the real system seldom matches the test bench. The result: motors run hotter, controllers trip unexpectedly, and service calls spike. I know this from hands-on work; we have to ask better questions at the start. Look, it’s simpler than you think: match torque curves to the actual load, not just the catalog numbers.
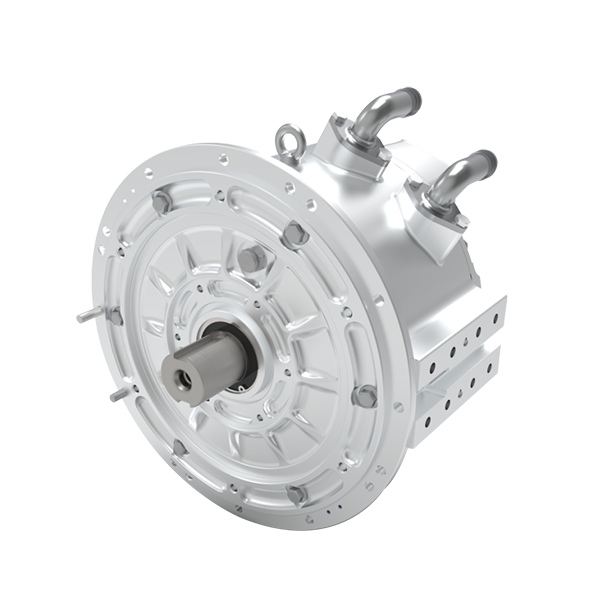
Technically, several assumptions cause most failures. First, continuous vs. peak torque is often confused. Second, cooling paths (natural vs. forced) are underestimated — leading to thermal throttling during long runs. Third, electromagnetic interference with nearby sensors can upset drives unless screening and grounding are carefully planned. These are not abstract problems; they show up as early wear, reduced efficiency, and user frustration. I have seen systems with neat CAD and poor field reliability — so we must correct that gap now. — and yes, small changes in inverter modulation or slot design can change outcomes significantly.
Looking Forward: New Principles and Practical Outlook
What’s Next for users and integrators?
Moving forward, I expect decision-making to shift from single-component specs toward system-level measures. For boat owners and fleet managers, that means thinking about energy per nautical mile, serviceability at the dock, and integration with battery management systems. In new installs and retrofits, I would advise exploring examples where optimized control algorithms reduced heat and extended motor life. For instance, adaptive torque control and better thermal modeling have shown clear gains in recent trials. I also want to mention practical marine choices: for small craft, reliable boat motors with modest peak torque but good continuous ratings often outperform over-specified units that need heavy cooling.
To be concrete, look to these trends: modular inverters that allow field firmware updates, sensors for real-time temperature and vibration feedback, and simpler mechanical access for maintenance. I think these features will separate satisfying systems from headache-prone ones. We should plan for upgrades, not one-off builds. The result? Lower downtime, better efficiency, and happier users. — sometimes the best innovation is less mystery and more clarity.
Before you decide, consider three simple evaluation metrics I use personally when choosing motors and systems: 1) Effective continuous torque at operating temperature, 2) System-level efficiency across expected duty cycles, and 3) Ease of maintenance and control updates in the field. If a solution scores well on these, it will serve longer and cost less in the long run. I hope this perspective helps you evaluate options more clearly. For reliable supplier resources and product details, please see Santroll: Santroll.